Overview
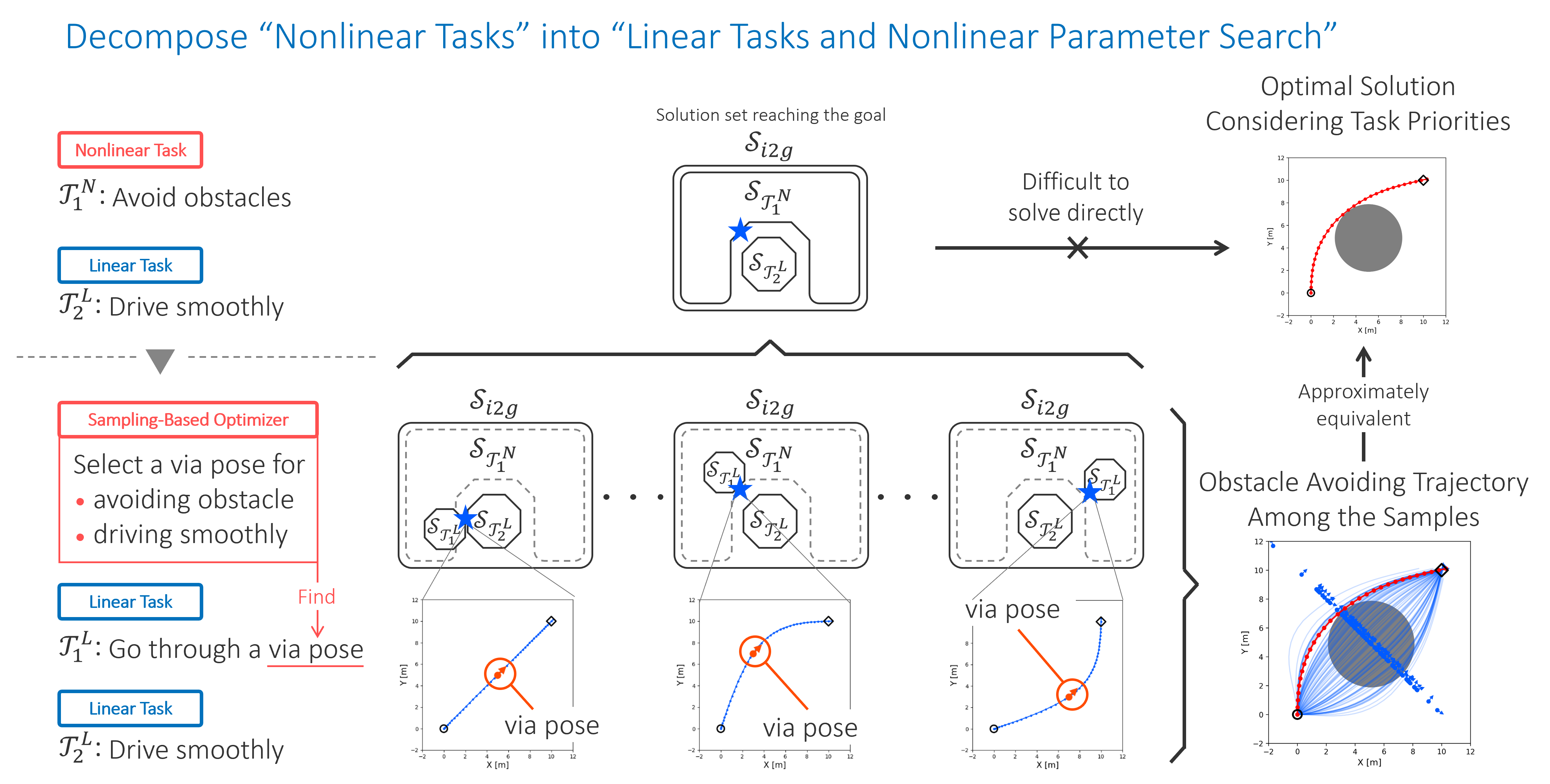
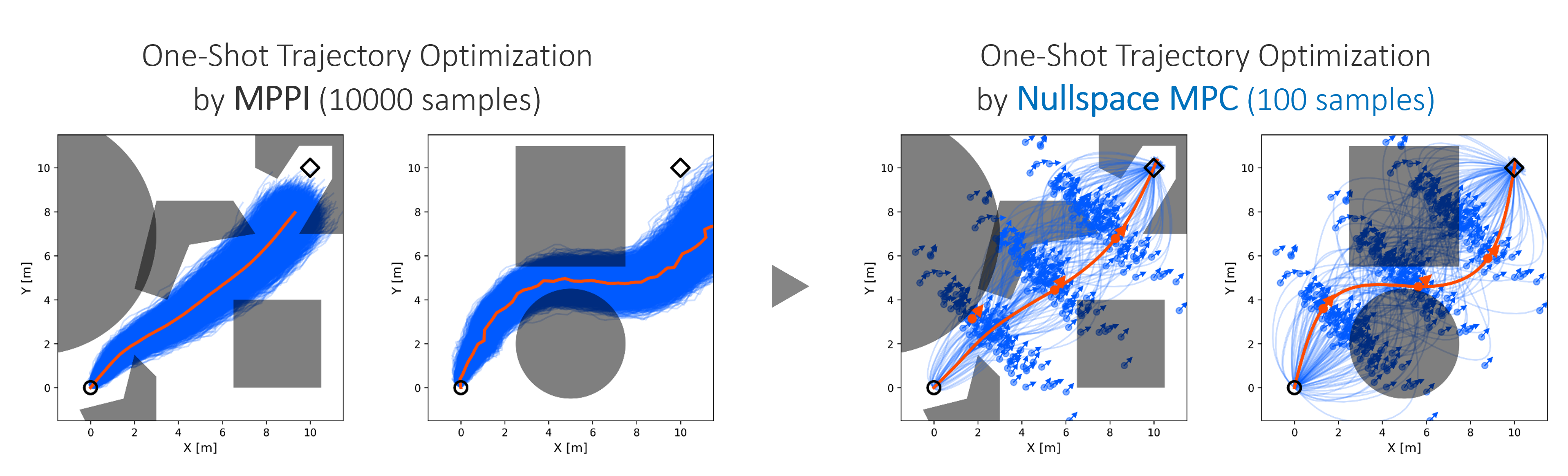
Nullspace Model Predictive Control (Nullspace MPC) is a novel, hierarchical motion planning framework designed for online, receding-horizon control. Its core motivation is to handle multiple objectives via a strict task hierarchy. This approach largely mitigates the difficult and often unreliable process of tuning weight parameters found in conventional single-cost-function methods. To resolve a diverse range of complex tasks with real-time efficiency, the framework intelligently decomposes the control problem according to the nature of the tasks. A sampling-based optimizer handles the global, nonlinear aspects of motion, such as roughly shaping the overall path to avoid arbitrarily shaped obstacles. Meanwhile, a gradient-based solver addresses local, linear tasks by strictly enforcing constraints like velocity/acceleration bounds and ensuring trajectory smoothness. As a result, Nullspace MPC provides navigation through narrow environments with an omni-directional vehicle that is demonstrably safer and more agile than the conventional method, MPPI.
Note: This project forms a core part of my Ph.D. dissertation, which was made publicly available on October 1, 2025.